xtian29 Mer 6 Nov 2019 - 21:38
xtian29 Mer 6 Nov 2019 - 21:38
Hello
A propos du servo, l'option 360° ne sert à rien.
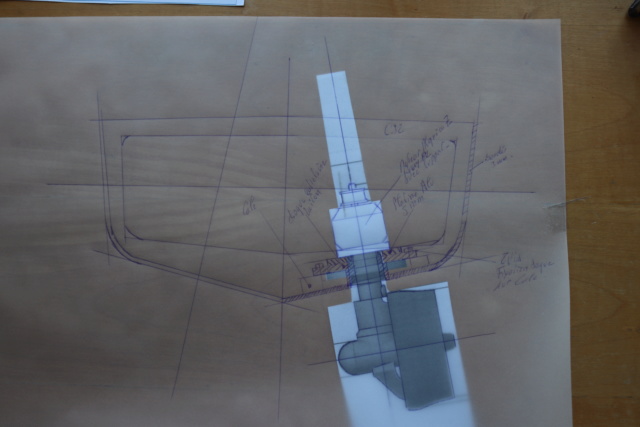
A l'origine Patrick82 et son Seapod utilisait un moteur-réducté pour la rotation azimutale (direction) du propulseur. La philosophie du système étant d'avoir la carte électronique qui reçoit une info de direction donné par les X/Y du stick de la radio - ensuite en fonction de cela la carte ordonne un mouvement au moteur qui s'arrêtera quand le capteur de position sera en accord avec les directions données par le X/Y.
Bref Patrick avait mis un moteur-réducté classique : un cylindre avec le moteur et un autre cylindre qui l'allonge avec les trains d'engrenage : un truc assez encombrant et pas aisé pour les fixation, je lui ai suggéré d'utiliser un servo classique dépouillé de son électronique et de sa butée - il ne reste dans la boite que le moteur avec son train engrenages et donc plus que deux fils : le rouge et le noir (il n'y plus de signal) l'avantage que j'y voyais était la compacité et la facilité de fixation de l'ensemble.
Du coup ce qui est surtout important c'est de prendre un servo costaud à pignons métalliques, mais le 360° on s'en fou
Et on s'en fou d'autant plus qu'une fois la butée enlevée notre servo tourne non pas sur 360° mais à l'infini. Car avec un servo à 360° tu fais quoi quand tu es à 355° et que tu dois aller à 5° ? Tu ne peux pas faire les 10° de plus pour tomber dans le tour suivant, non toi tu es obligé de faire 250° en arrière.
En réalité donc, le servo comme on l'utilise ici est juste un moteur-réducté dans un corps de servo et l'avantage de la compacité, des quatre pattes de fixation et de l'arbre crénelé.
Sinon, oui la courroie de 6mm devrait suffire.
A+

Dernière édition par xtian29 le Jeu 7 Nov 2019 - 8:38, édité 1 fois (Raison : orthographe ... mais il en reste surement)