Bonjour les tugs
je viens de voir sur un site hollandais, une photo d'un montage electronique de commande de zdrive; Je ne sais pas copier la photo, je mets le lien ,vous verrez dans le défilement des photos, trois photos d'un montage pour zdrive, Quand pensez vous,
http://www.smgijmond.nl/
http://www.smgijmond.nl/Werkschependag2010A/album/index.html
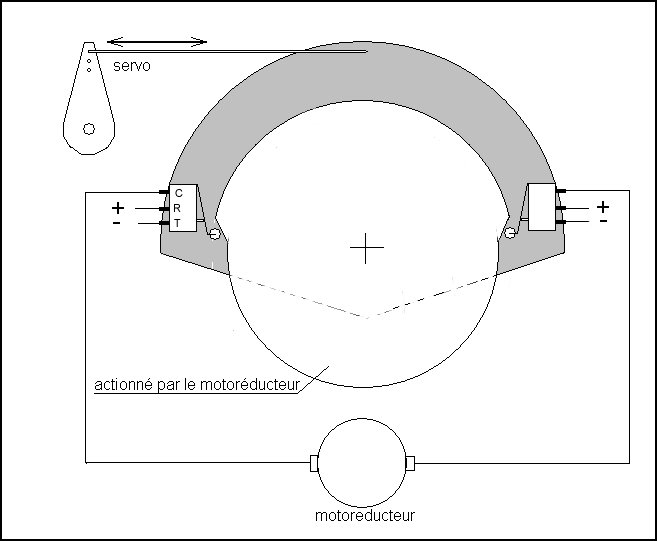
A premiere vue, c'est le principe du servo avec son potentiometre, comme les servos treuil de voile, ou le tambour fait plusieurs tours.
Michel
je viens de voir sur un site hollandais, une photo d'un montage electronique de commande de zdrive; Je ne sais pas copier la photo, je mets le lien ,vous verrez dans le défilement des photos, trois photos d'un montage pour zdrive, Quand pensez vous,
http://www.smgijmond.nl/
http://www.smgijmond.nl/Werkschependag2010A/album/index.html
A premiere vue, c'est le principe du servo avec son potentiometre, comme les servos treuil de voile, ou le tambour fait plusieurs tours.
Michel













 si vous avez des idées pour améliorer le système à Lapin .Car mon futur canot sera un ASD au 1/25ème avec des hélices de 100 mm .Alors il va falloir que ça cause sur l'eau ....
si vous avez des idées pour améliorer le système à Lapin .Car mon futur canot sera un ASD au 1/25ème avec des hélices de 100 mm .Alors il va falloir que ça cause sur l'eau ....